Projects
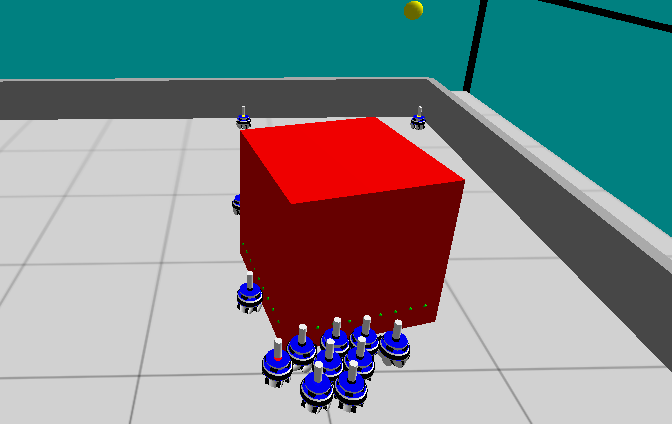
Ongoing project on collective transport of object by swarm of robots in an obstacle filled environment inspired by chain formation and occlusion-based transport
Swarm Robotics
C++
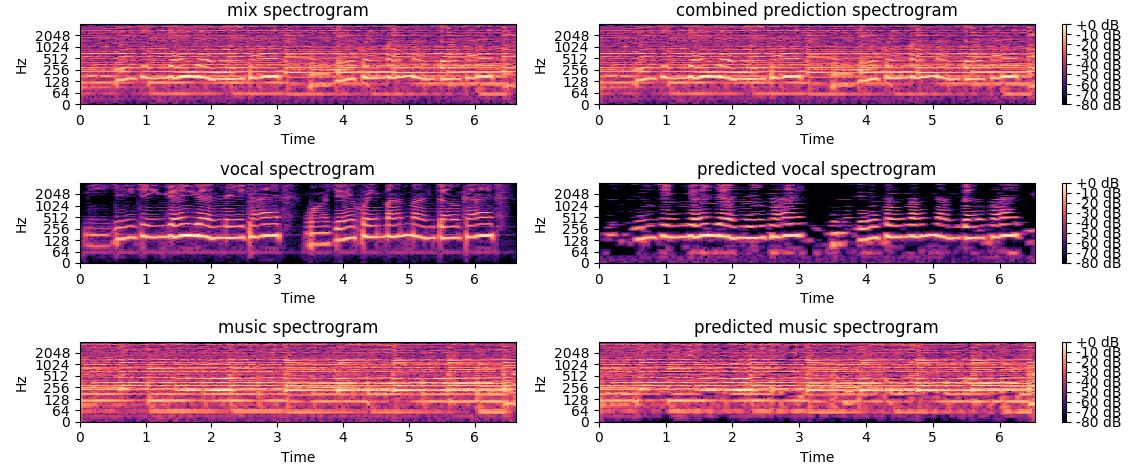
Joint optimization of masks and deep recurring neural network to separate two audio sources or music/vocals from mixture of audio inputs using custom keras time-frequency masking layers
Tensorflow
Python
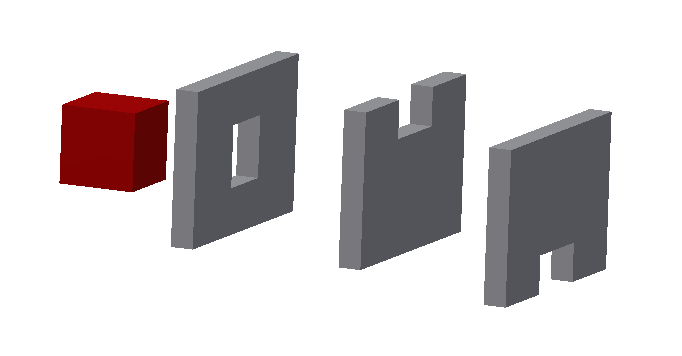
A novel motion planning algorithm to manipulate deformable objects without expensive modeling or simulating deformation
OpenRAVE
C++
Developed and implemented a convolution neural network to detect pedestrian bounding boxes using weak supervision (i.e train data labeled only as present/absent) in 2D images
Tensorflow
Python
Developed code for perception tasks for simulated NASA R5 robot in an agile development environment with 30 members
OpenCV
C++
Agile
Developed a proof-of-concept prototype for passive exo-suit to enhance users’ running and walking performance
Dynamics